约 3311 个字 12 张图片 预计阅读时间 17 分钟 共被读过 次
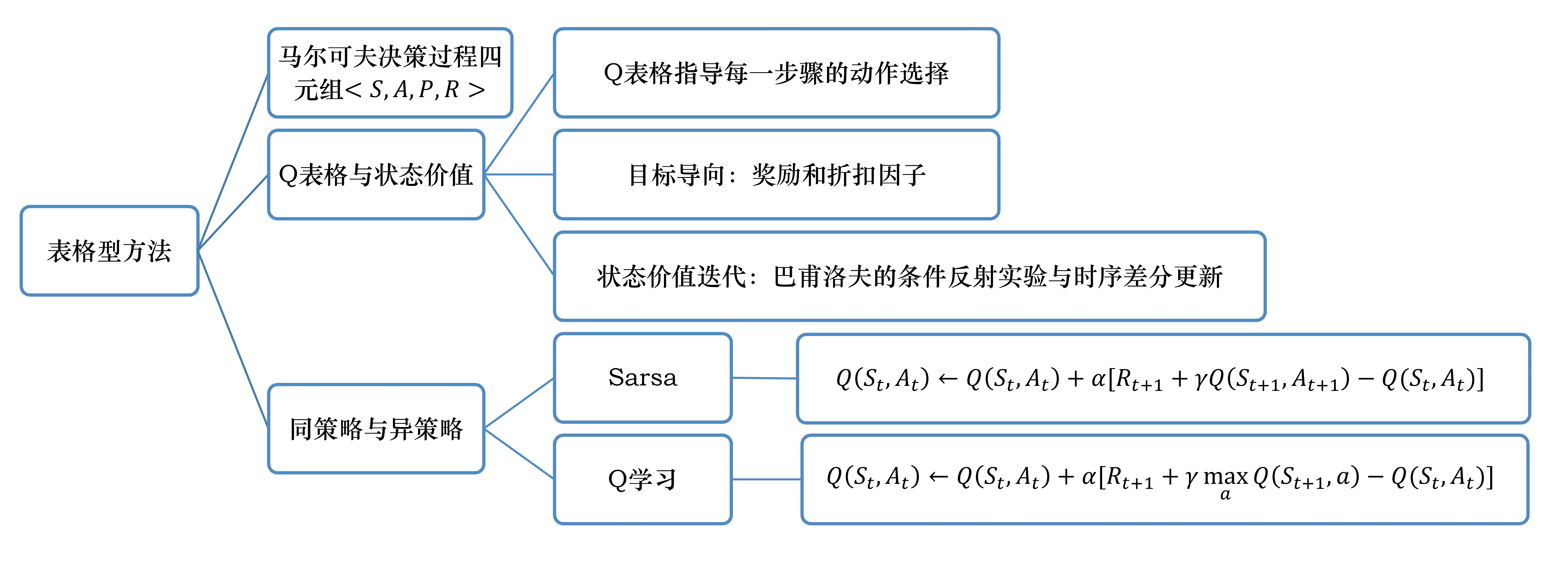
第3章 表格型方法总结¶
3.1 马尔可夫决策过程(MDP)¶
核心概念¶
- 四元组:\((S, A, P, R)\),分别表示状态集合、动作集合、状态转移概率、奖励函数。
- 马尔可夫性质:下一时刻状态仅依赖当前状态和动作,不依赖历史。
- 有模型 vs 免模型:
- 有模型:已知\(P\)和\(R\),可用动态规划(策略迭代、价值迭代)。
- 免模型:未知\(P\)和\(R\),依赖试错探索(如蒙特卡洛、时序差分)。
状态转移示例¶
表示在状态\(s_t\)执行动作\(a_t\)后转移到\(s_{t+1}\)并获得奖励\(r_t\)的概率。
3.2 Q表格¶
核心概念¶
- Q函数:\(Q(s, a)\)表示在状态\(s\)选择动作\(a\)的长期期望回报。
- Q表格:行代表状态,列代表动作,存储每个状态-动作对的Q值。
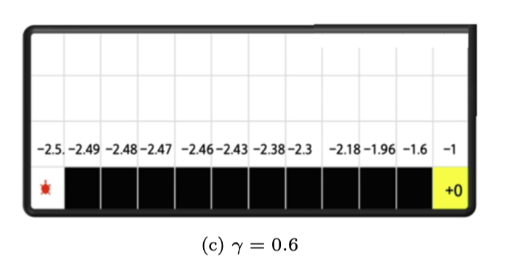
- 折扣因子\(\gamma\):平衡即时奖励与未来奖励的重要性(\(\gamma=0\)仅看单步,\(\gamma=1\)考虑无限步)。
示例:悬崖行走问题¶
- 目标:从起点到终点,避免掉入悬崖。
- 奖励:每走一步\(-1\),掉崖\(-100\)。
- Q值更新逻辑:
3.3 免模型预测¶
这些方法都是给定策略的!
方法对比¶
| 方法 | 更新方式 | 特点 |
|---|---|---|
| 蒙特卡洛 | 使用完整轨迹的回报均值更新Q值 | 高方差,需完整轨迹,无偏估计 |
| 时序差分 | 单步更新(TD目标 = 即时奖励 + γ·下一状态Q值) | 低方差,可在线学习,有偏估计 |
蒙特卡洛(MC)更新公式¶
- 其中, \(\alpha\) 代表的是学习率,可以人为设置
- \(G_t\) 是把一条轨迹跑完后才得出来的回报
时序差分(TD)更新公式¶
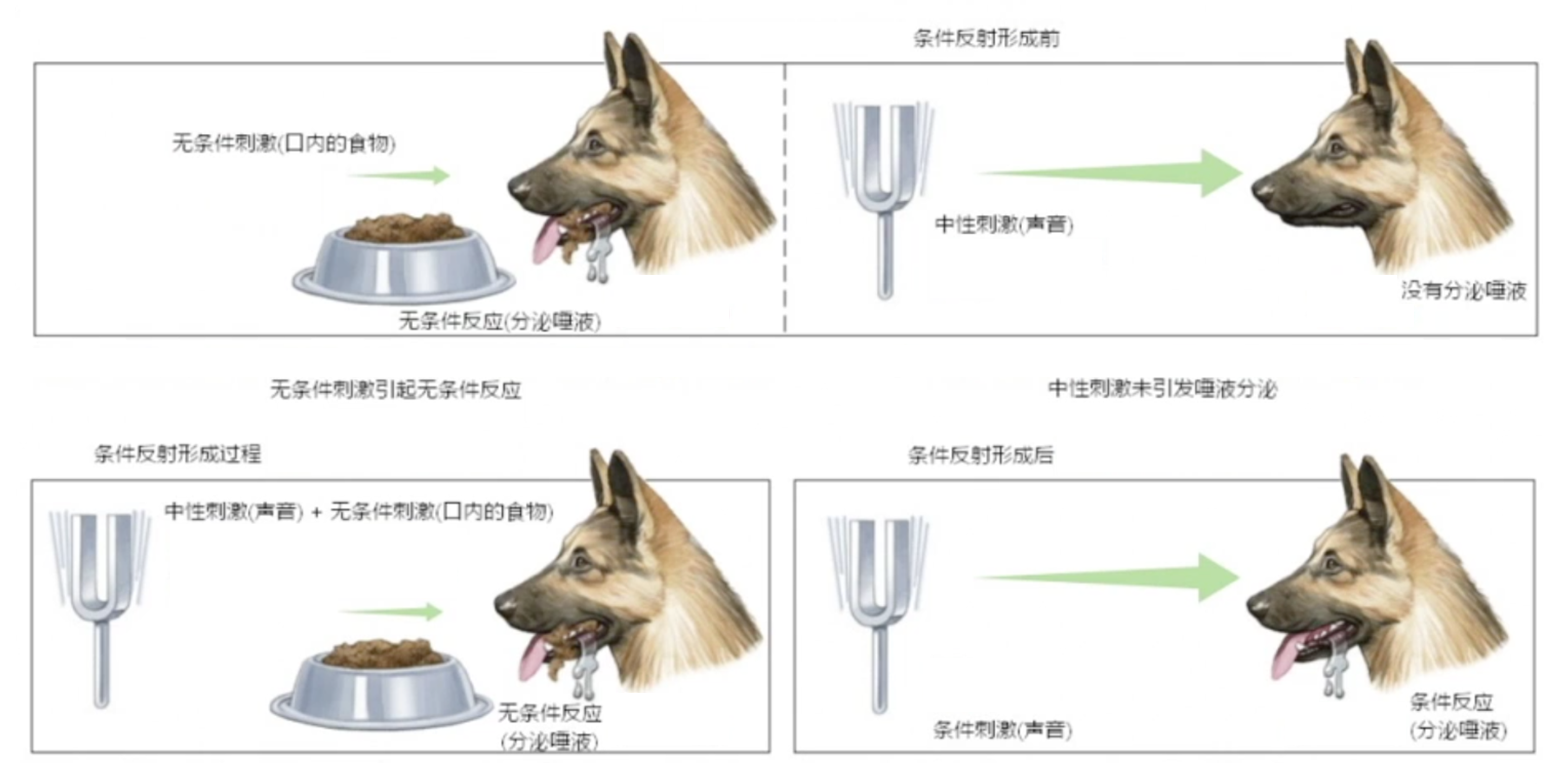
- TD误差: \(\delta = r_{t+1} + \gamma V(s_{t+1}) - V(s_t)\) ,其中 \(\delta = r_{t+1} + \gamma V(s_{t+1})\) 被称为时序差分目标(TD target),时序差分目标是带衰减的未来奖励的总和。
- 物理意义:类似巴甫洛夫条件反射,通过相邻状态的价值迭代更新。
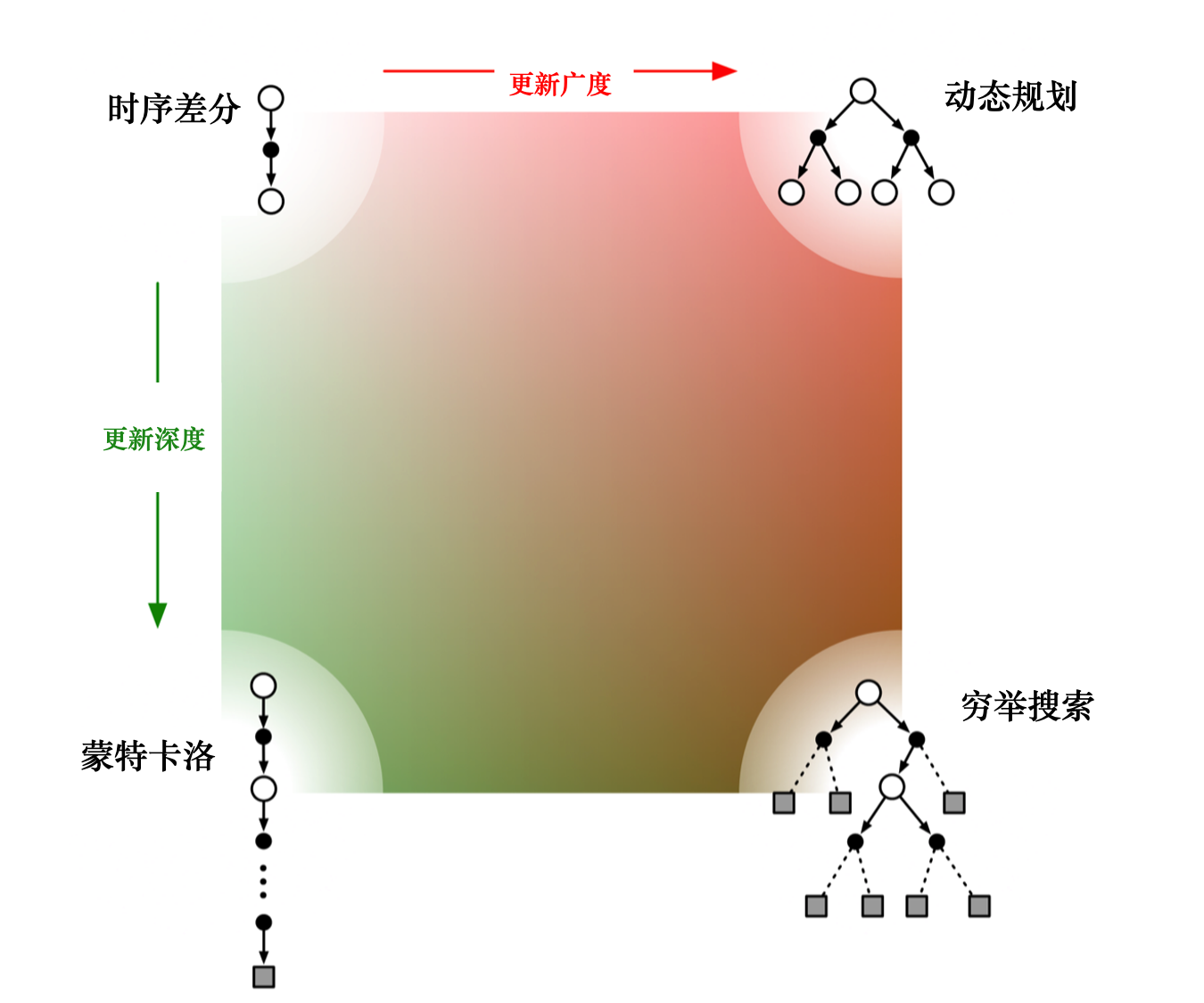
n步时序差分(n-step TD)¶
得到时序差分目标之后,我们用增量式学习(incremental learning)的方法来更新状态的价值:
- 更新的深度与广度的对比一览图:
3.4 免模型控制¶
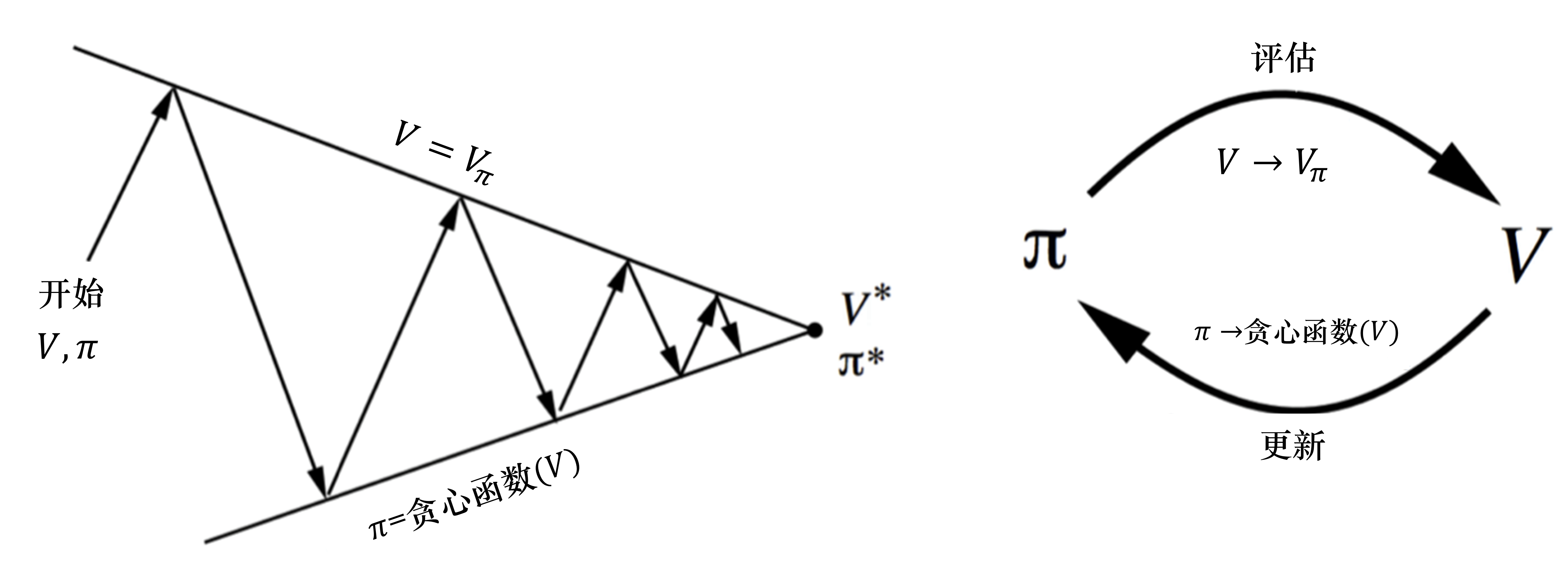
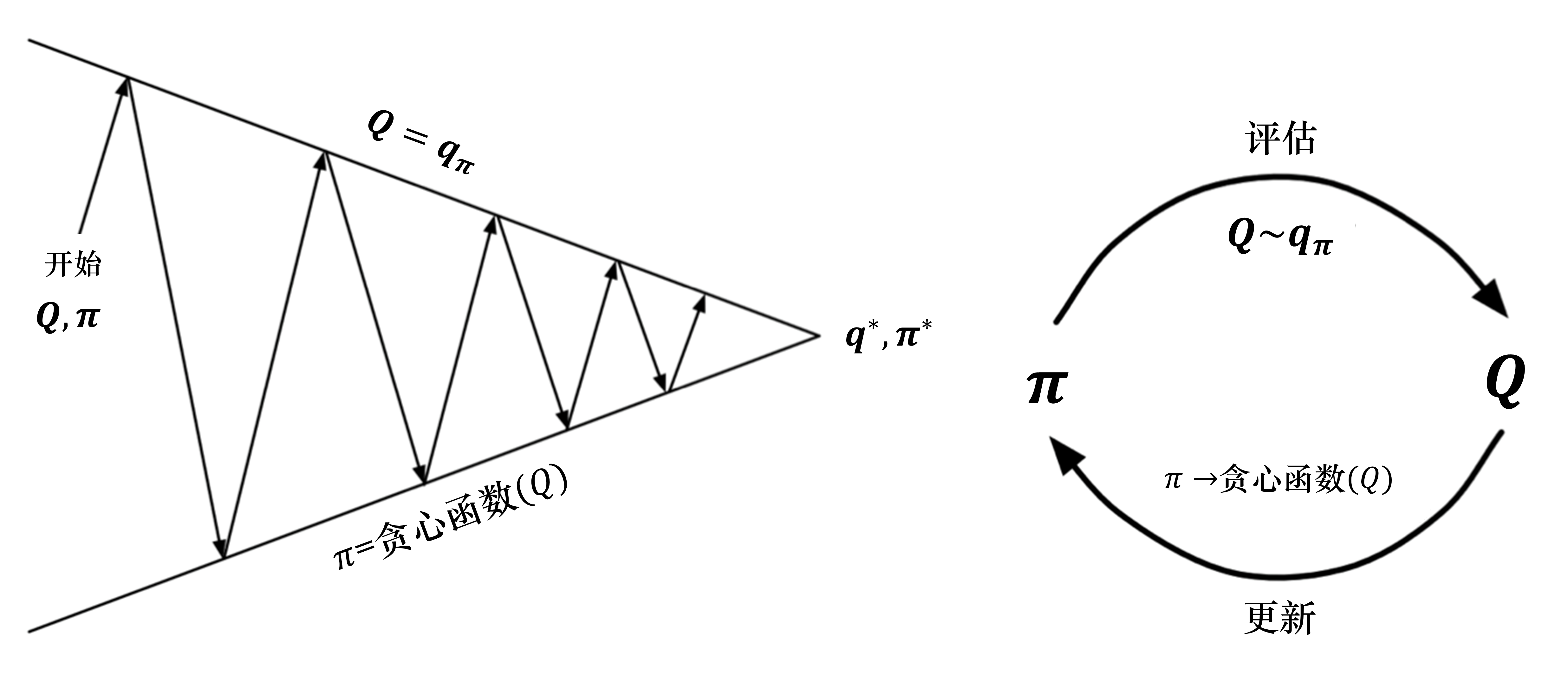
我们不知道马尔可夫决策过程模型的情况下,如何优化价值函数,得到最佳的策略呢?我们可以把策略迭代进行广义的推广,使它能够兼容蒙特卡洛和时序差分的方法,即带有蒙特卡洛方法和时序差分方法的广义策略迭代(generalized policy iteration,GPI)。
策略迭代由两个步骤组成。第一,我们根据给定的当前策略 \(\pi\) 来估计价值函数;第二,得到估计的价值函数后,我们通过贪心的方法来改进策略,即
这两个步骤是一个互相迭代的过程。
我们可以计算出策略 \(\pi\) 的动作价值函数,并且可以计算针对状态 \(s \in S\) 的新策略 \(\pi_{i+1}\)。但得到状态价值函数后,我们并不知道奖励函数 \(R(s,a)\) 和状态转移 \(P(s'|s,a)\),所以就无法估计 Q 函数
针对上述情况,我们引入了广义的策略迭代的方法。
我们对策略评估部分进行修改,使用蒙特卡洛的方法代替动态规划的方法估计 Q 函数。我们首先进行策略评估,使用蒙特卡洛方法来估计策略 \(Q=Q_{\pi}\),然后进行策略更新,即得到 Q 函数后,我们就可以通过贪心的方法去改进它:
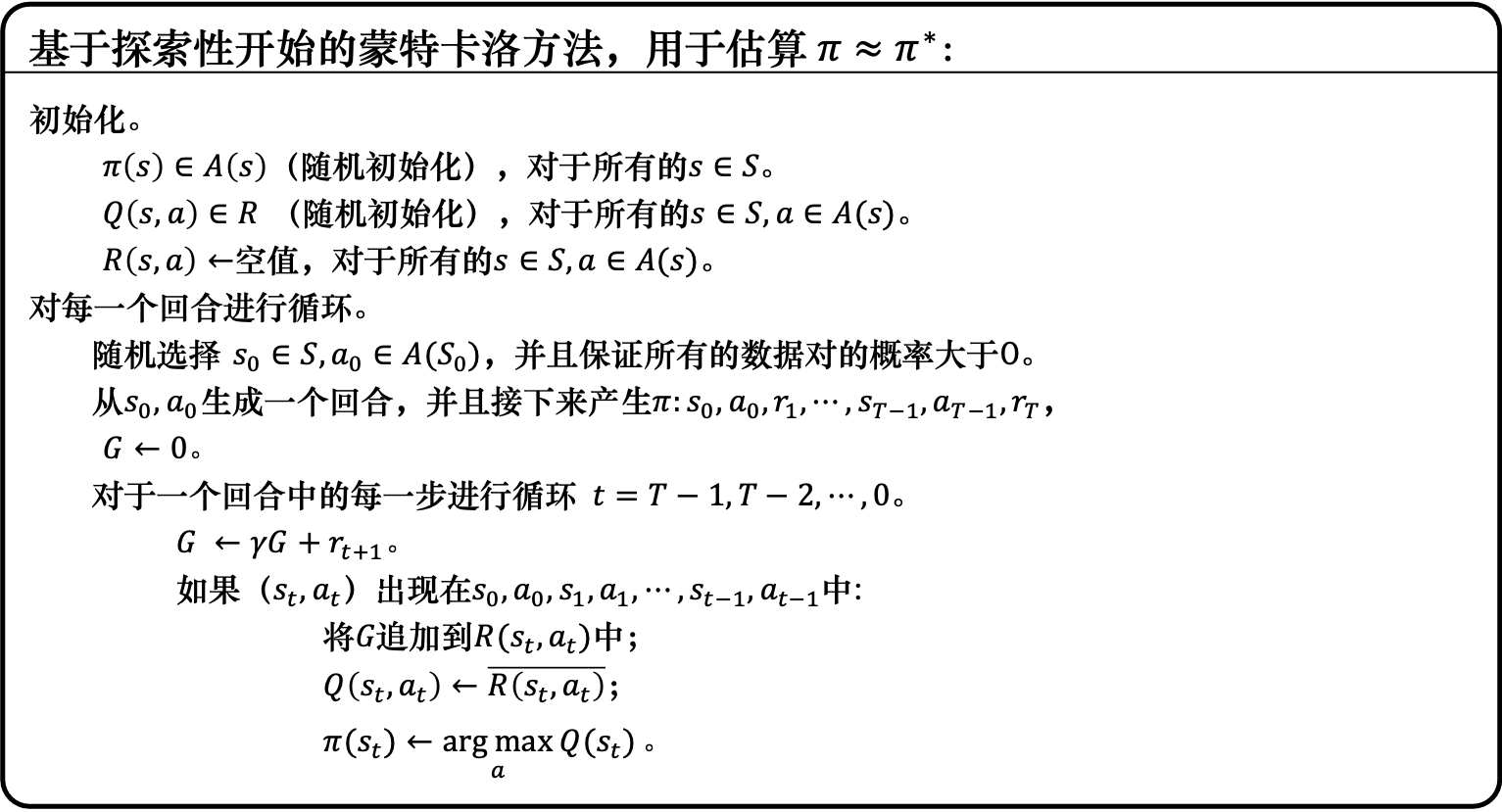
一个保证策略迭代收敛的假设是回合有探索性开始(exploring start)。
假设每一个回合都有一个探索性开始,探索性开始保证所有的状态和动作都在无限步的执行后能被采样到,这样才能很好地进行估计。
算法通过蒙特卡洛方法产生很多轨迹,每条轨迹都可以算出它的价值。然后,我们可以通过平均的方法去估计 Q 函数。Q 函数可以看成一个Q表格,我们通过采样的方法把表格的每个单元的值都填上,然后使用策略改进来选取更好的策略。
如何用蒙特卡洛方法来填 Q 表格是这个算法的核心。
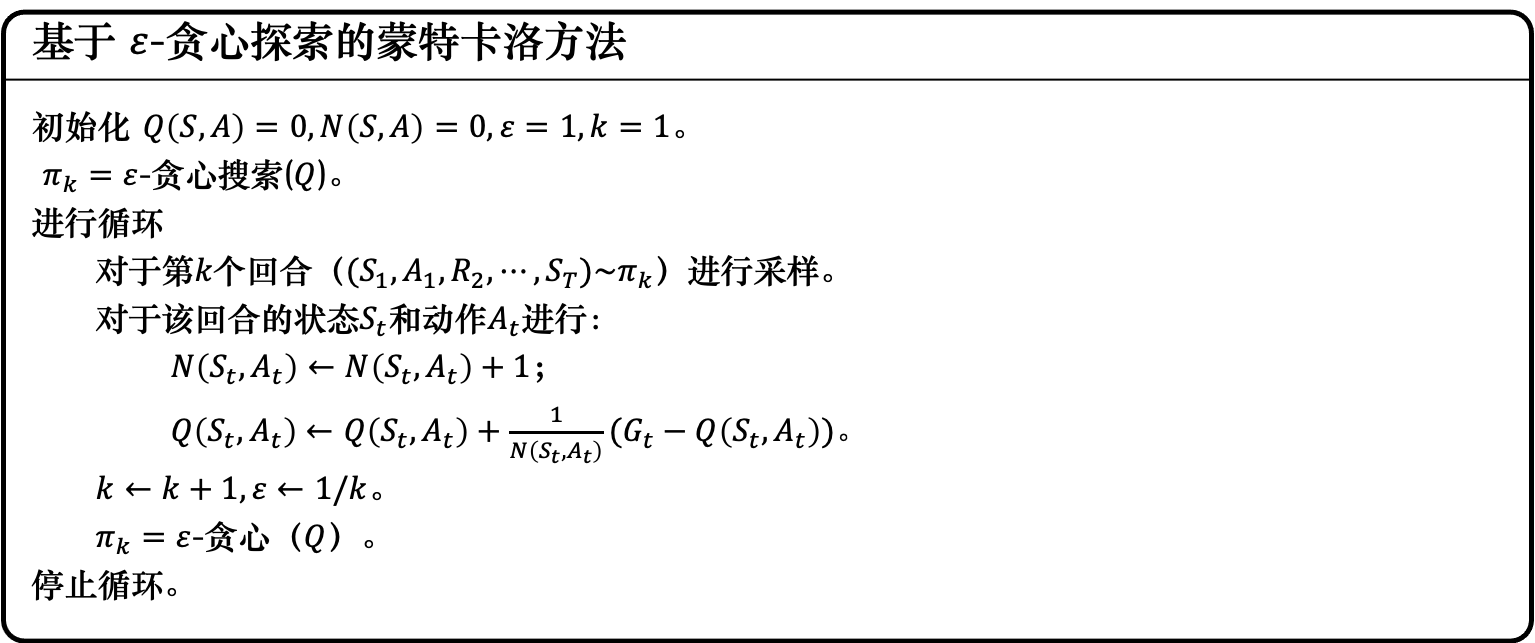
为了确保蒙特卡洛方法能够有足够的探索,我们使用了 \(\varepsilon\)-贪心(\(\varepsilon\text{-greedy}\))探索。
\(\varepsilon\)-贪心是指我们有 \(1-\varepsilon\) 的概率会按照 Q函数来决定动作,通常 \(\varepsilon\) 就设一个很小的值, \(1-\varepsilon\) 可能是 0.9,也就是 0.9 的概率会按照Q函数来决定动作,但是我们有 0.1 的概率是随机的。通常在实现上,\(\varepsilon\) 的值会随着时间递减。在最开始的时候,因为我们还不知道哪个动作是比较好的,所以会花比较多的时间探索。接下来随着训练的次数越来越多,我们已经比较确定哪一个动作是比较好的,就会减少探索,把 \(\varepsilon\) 的值变小。主要根据 Q函数来决定动作,比较少随机决定动作,这就是 \(\varepsilon\)-贪心。
当我们使用蒙特卡洛方法和 \(\varepsilon\)-贪心探索的时候,可以确保价值函数是单调的、改进的。对于任何 \(\varepsilon\)-贪心策略 \(\pi\),关于 \(Q_{\pi}\) 的 \(\varepsilon\)-贪心策略 \(\pi^{\prime}\) 都是一个改进,即 \(V_{\pi}(s) \leqslant V_{\pi^{\prime}}(s)\),证明过程如下:
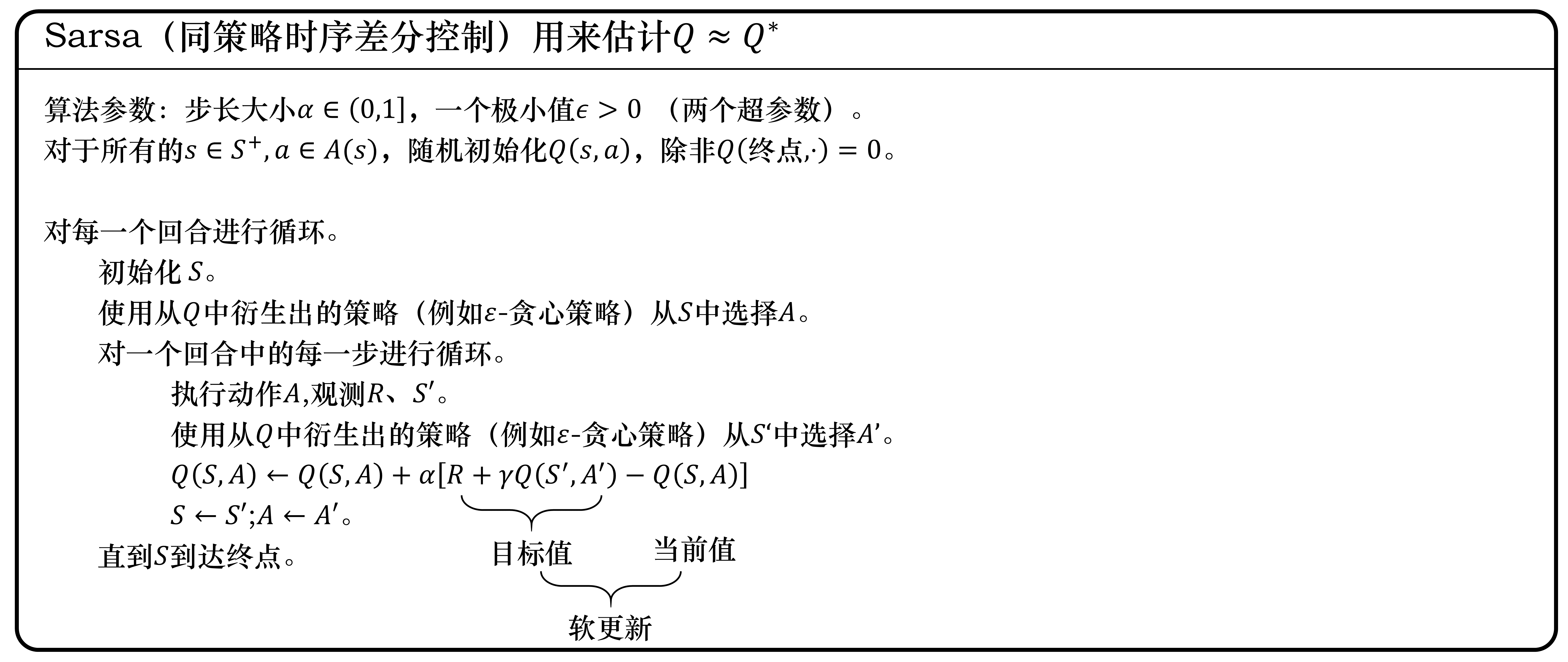
Sarsa(State-Action-Reward-State-Action同策略时序差分控制)¶
- 更新规则:
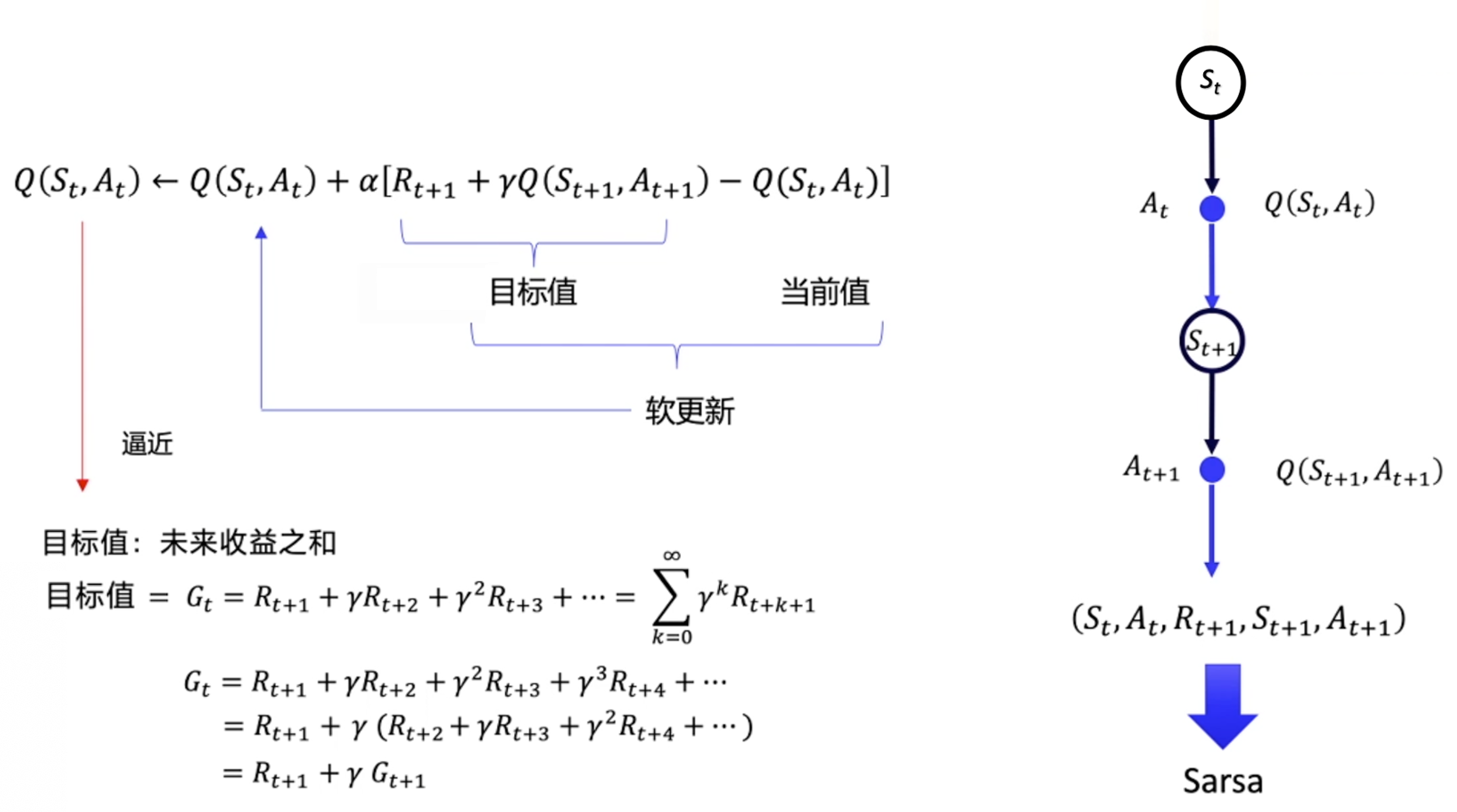
- 特点:使用实际执行的动作\(a_{t+1}\)更新Q值,策略保守,适合高风险环境(如悬崖行走)。
Q学习(异策略)¶
- 更新规则:
我们再通过对比的方式来进一步理解 Q学习。Q学习是异策略的时序差分学习方法,Sarsa 是同策略的时序差分学习方法。
Sarsa 在更新 Q 表格的时候,它用到的是 \(A'\) 。我们要获取下一个 Q 值的时候,\(A'\) 是下一个步骤一定会执行的动作,这个动作有可能是 \(\varepsilon\)-贪心方法采样出来的动作,也有可能是最大化 Q 值对应的动作,也有可能是随机动作,但这是它实际执行的动作。
但是 Q学习 在更新 Q 表格的时候,它用到的是 Q 值 \(Q(S',a)\) 对应的动作 ,它不一定是下一个步骤会执行的实际的动作,因为我们下一个实际会执行的那个动作可能会探索。
Q学习默认的下一个动作不是通过行为策略来选取的,Q学习直接看Q表格,取它的最大化的值,它是默认 \(A'\) 为最佳策略选取的动作,所以 Q学习 在学习的时候,不需要传入 \(A'\),即 \(a_{t+1}\) 的值。
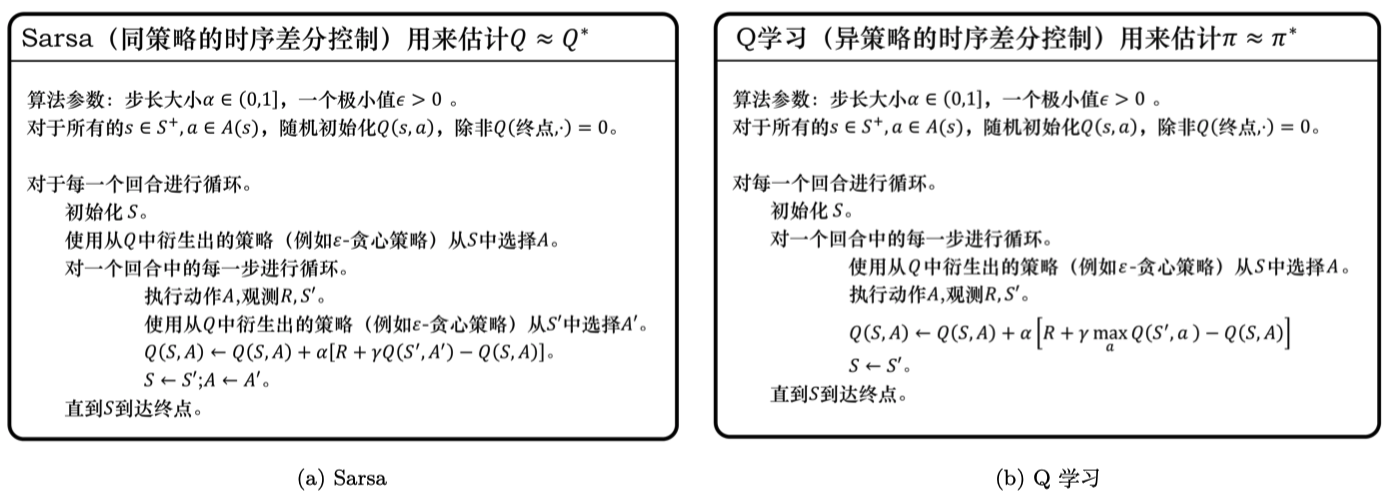
Sarsa 和 Q学习 的更新公式是一样的,区别只在目标计算的部分,
Sarsa 是 \(r_{t+1}+\gamma Q(s_{t+1}, a_{t+1})\),
Q学习 是 \(r_{t+1}+\gamma \underset{a}{\max} Q\left(s_{t+1}, a\right)\) 。
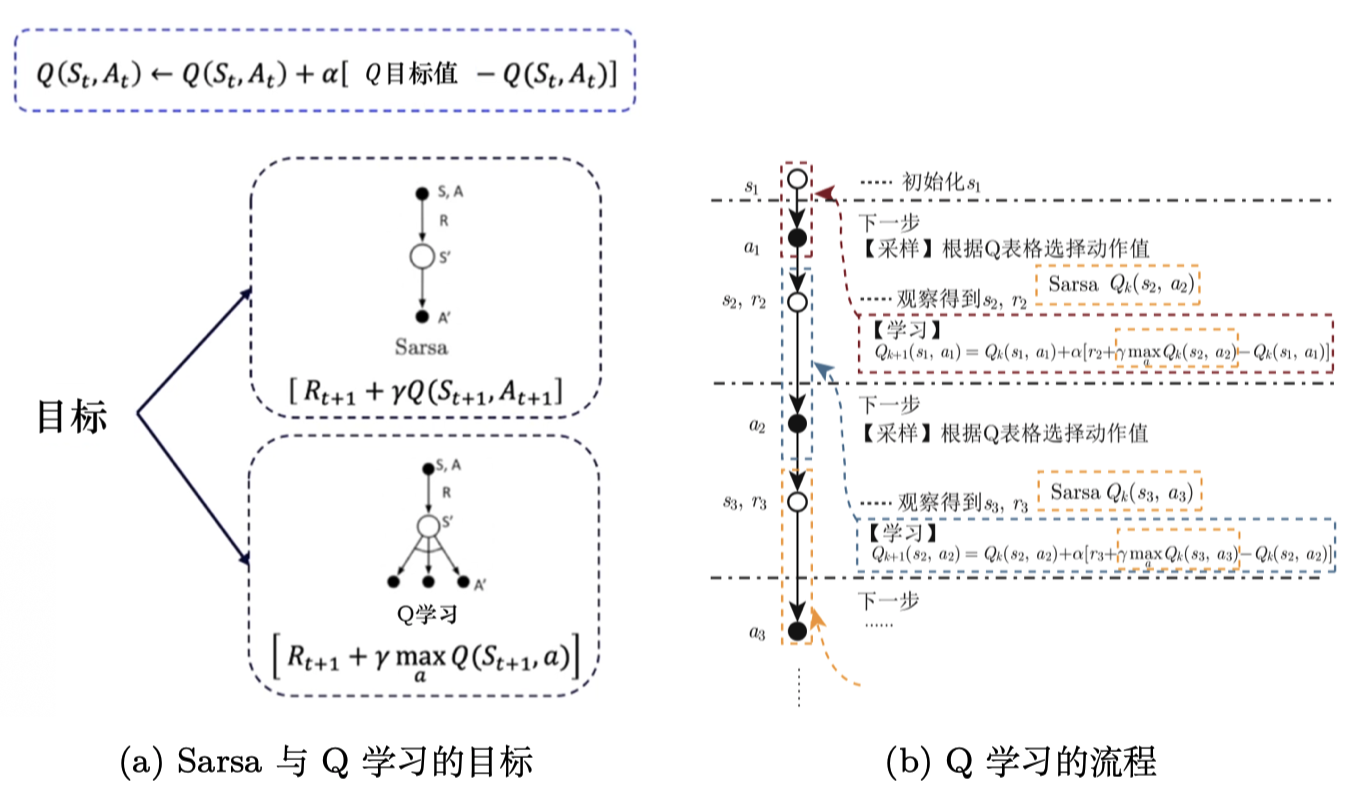
如图 3.34a 所示,Sarsa 用自己的策略产生了 \(S,A,R,S',A'\) 这条轨迹,然后用 \(Q(s_{t+1},a_{t+1})\) 去更新原本的 Q 值 \(Q(s_t,a_t)\)。
但是 Q学习 并不需要知道我们实际上选择哪一个动作 ,它默认下一个动作就是 Q 值最大的那个动作。Q学习知道实际上行为策略可能会有 0.1 的概率选择别的动作,但 Q 学习并不担心受到探索的影响,它默认按照最佳的策略去优化目标策略,所以它可以更大胆地去寻找最优的路径,它表现得比 Sarsa 大胆得多。
如图 3.34b 所示,我们对Q学习进行逐步拆解,Q学习与 Sarsa 唯一不一样的就是并不需要提前知道 \(A_2\) ,就能更新 \(Q(S_1,A_1)\) 。在一个回合的训练当中,Q学习 在学习之前也不需要获取下一个动作 \(A'\),它只需要前面的 \((S,A,R,S')\) ,这与 Sarsa 很不一样。
同策略 vs 异策略¶
- Sarsa 是一个典型的同策略算法,它只用了一个策略 \(\pi\),它不仅使用策略 \(\pi\) 学习,还使用策略 \(\pi\) 与环境交互产生经验。如果策略采用 \(\varepsilon\)-贪心算法,它需要兼顾探索,为了兼顾探索和利用,它训练的时候会显得有点“胆小”。它在解决悬崖行走问题的时候,会尽可能地远离悬崖边,确保哪怕自己不小心探索了一点儿,也还是在安全区域内。此外,因为采用的是 \(\varepsilon\)-贪心 算法,策略会不断改变(\(\varepsilon\) 值会不断变小),所以策略不稳定。
- Q学习是一个典型的异策略算法,它有两种策略————目标策略和行为策略,它分离了目标策略与行为策略。Q学习可以大胆地用行为策略探索得到的经验轨迹来优化目标策略,从而更有可能探索到最佳策略。行为策略可以采用 \(\varepsilon\)-贪心 算法,但目标策略采用的是贪心算法,它直接根据行为策略采集到的数据来采用最佳策略,所以 Q学习 不需要兼顾探索。
- 我们比较一下 Q学习 和 Sarsa 的更新公式,就可以发现 Sarsa 并没有选取最大值的最大化操作。因此,Q学习是一个非常激进的方法,它希望每一步都获得最大的利益;Sarsa 则相对较为保守,它会选择一条相对安全的迭代路线。
3.5 关键词¶
- 概率函数和奖励函数:概率函数定量地表达状态转移的概率,其可以表现环境的随机性。但是实际上,我们经常处于一个未知的环境中,即概率函数和奖励函数是未知的。
- Q表格:其表示形式是表格,其中表格的横轴为动作(智能体的动作),纵轴为环境的状态,每一个坐标点对应某时刻智能体和环境的状态,并通过对应的奖励反馈选择被执行的动作。一般情况下,Q表格是一个已经训练好的表格,不过我们也可以每执行一步,就对Q表格进行更新,然后用下一个状态的Q值来更新当前状态的Q值(即时序差分方法)。
- 时序差分(temporal difference,TD)方法:一种Q函数(Q值)的更新方式,流程是使用下一步的Q值 \(Q(s_{t+1},a_{t+1})\) 来更新当前步的Q值 \(Q(s_t,a_t)\)。完整的计算公式如下:\(Q(s_t,a_t) \leftarrow Q(s_t,a_t) + \alpha [r_{t+1}+\gamma Q(s_{t+1},a_{t+1})-Q(s_t,a_t)]\) 。
- Sarsa算法:一种更新前一时刻状态的单步更新的强化学习算法,也是一种同策略学习算法。该算法由于每次更新Q函数时需要知道前一步的状态、动作、奖励以及当前时刻的状态、将要执行的动作,即 \(s_{t}\)、\(a_{t}\)、\(r_{t+1}\)、\(s_{t+1}\)、\(a_{t+1}\) 这几个值,因此被称为 Sarsa 算法。智能体每进行一次循环,都会用 \(s_{t}\)、\(a_{t}\)、\(r_{t+1}\)、\(s_{t+1}\)、\(a_{t+1}\) 对前一步的Q值(函数)进行一次更新。