约 678 个字 1 张图片 预计阅读时间 3 分钟 共被读过 次
第8章 针对连续动作的深度Q网络总结¶
深度Q网络与策略梯度的比较¶
- 深度Q网络比策略梯度更稳定
- 深度Q网络容易训练的原因:
- 只要能估计出Q函数,就能找到好的策略
- 估计Q函数是回归问题,易于评估(通过损失函数下降)
- 策略的改进有保证
深度Q网络的主要挑战:连续动作¶
连续动作的应用场景¶
- 控制方向盘角度(自动驾驶)
- 控制机器人多个关节角度(机器人控制)
连续动作的挑战¶
-
深度Q网络需要解决的核心优化问题:
-
离散动作易于穷举所有可能性
- 连续动作无法枚举所有可能值
解决连续动作的四种方案¶
方案1:对动作进行采样¶
- 采样N个可能的动作:{a₁, a₂, ..., aₙ}
- 利用GPU并行计算这N个动作的Q值
- 选择Q值最大的动作
- 缺点:采样有限,结果可能不精确
方案2:梯度上升¶
- 将a作为参数,用梯度上升更新a的值
- 目标是最大化Q函数
- 缺点:
- 可能找到局部最大值而非全局最大值
- 计算成本高(每次决策都需要迭代训练)
方案3:特殊设计网络架构¶
[1603.00748] Continuous Deep Q-Learning with Model-based Acceleration
-
设计特殊的Q函数形式,使argmax操作变得简单
-
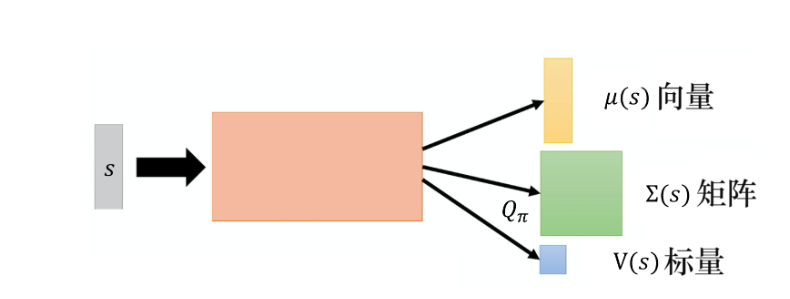
网络架构:
- 输入状态s
- 输出:向量μ(s)、矩阵Σ(s)和标量V(s)
- Q函数设计为:
$$
Q(s,a)=-(a-\mu(s))^T \Sigma(s)(a-\mu(s))+V(s)
$$
- 其中Σ(s)是正定矩阵,通过Σ(s)=LL^T构造,L为下三角矩阵
- 求解argmax:
Text Only
- 要最大化Q(s,a),需要最小化$(a-\mu(s))^T \Sigma(s)(a-\mu(s))$
- 当a=μ(s)时,该项为0,达到最小
- 因此最优动作a=μ(s)
方案4:不使用深度Q网络¶
- 将基于策略的方法(PPO)和基于价值的方法(DQN)结合
- 采用演员-评论员架构
关键概念¶
连续动作空间¶
- 动作表示为向量,每个维度可以取连续值
- 例如:机器人控制中,向量各维度表示不同关节角度
正定矩阵¶
- n阶对称矩阵A,满足对任意非零n维向量x,都有x^T·A·x>0
- 在方案3中用于构造特殊的Q函数形式
argmax操作¶
- 深度Q网络的核心挑战
- 在连续动作空间中难以直接求解